
INDIAN ARMED FORCES CHIEFS ON OUR RELENTLESS AND FOCUSED PUBLISHING EFFORTS

The insightful articles, inspiring narrations and analytical perspectives presented by the Editorial Team, establish an alluring connect with the reader. My compliments and best wishes to SP Guide Publications.

"Over the past 60 years, the growth of SP Guide Publications has mirrored the rising stature of Indian Navy. Its well-researched and informative magazines on Defence and Aerospace sector have served to shape an educated opinion of our military personnel, policy makers and the public alike. I wish SP's Publication team continued success, fair winds and following seas in all future endeavour!"

Since, its inception in 1964, SP Guide Publications has consistently demonstrated commitment to high-quality journalism in the aerospace and defence sectors, earning a well-deserved reputation as Asia's largest media house in this domain. I wish SP Guide Publications continued success in its pursuit of excellence.

- MoD initiates comprehensive review of Defence Acquisition Procedure 2020, pushes for defence reforms
- G7: The Swansong
- Kalinga Connect: South Asia to Polynesia
- Advanced MRSAM for India for a greater firepower
- Must Credit DRDO for Operation Sindoor, now what is next for defence R&D?
- Operation Sindoor | Day 2 DGMOs Briefing
- Operation Sindoor: Resolute yet Restrained
Technology
Striking Stealthily From the Deep
The Indian Navy wants AUVs that can carry variable payloads like high definition sonars and underwater cameras for surveillance and reconnaissance activities of the seabed, such as MCM operations, oceanographic survey and specialised mapping
Victory smiles upon those who anticipate the changes in the character of war, not upon those who wait to adapt themselves after the changes occur — Giulio Douhet
One of the most salient military technology trends is the growing prominence of unmanned vehicles. The promising potential of unmanned technology has already reached fruition in the air domain in unmanned aerial vehicles (UAVs), as witnessed in the recent global war on terror. There is every indication that there would be similar impact in the undersea domain as in near future, navies aspire to acquire formidable sea denial and sea control capabilities. Incidentally, the first autonomous underwater vehicle was developed by the University of Washington in the early 1960s and was called the selfpropelled underwater research vehicle 1 (SPURV 1). It weighed about 480 kg, dived up to three km, and could operate up to 5.5 hours at 2.2 m/s speed.
An unmanned underwater vehicle (UUV) is a machine that uses a propulsion system to transit through the water. It can manoeuvre in three dimensions (azimuth plane and depth) and control its speed by the use of sophisticated computerised systems onboard the vehicle itself. Generally, an UUV can operate from eight hours to fifty hours at a speed between 0.5 m/s to 2.5 m/s. The economic speed is around 1.5 m/s at which it achieves its maximum range. The depth of operation varies between 1,000 m and 6,000 m. The UUV can be preprogrammed to adhere to course, speed and depths as desired by the operator at a remote location, and carry out specific tasks utilising a bank of sensors on the UUV. The data collection can be both time- and space-based and is referenced with respect to coordinates of the place of operation.
The UUVs carry out their routine tasks unattended, meaning thereby that once deployed, the operator is relatively free to attend to other tasks as the UUV reaches its designated area of operation and starts carrying out its mission, be it survey, search, or surveillance. The UUV reports at designed intervals about its technical wellbeing and also about the details of task undertaken by means of communicating through satellite communication, acoustic, or RF modes. The UUV is recoverable at the end of its mission and is available for reuse after maintenance.
The UUVs can operate under most environmental conditions and because of this they are used for accurate bathymetric survey by survey companies, and also for sea floor mapping by oil and gas industry, prior to commencing construction of subsea structures. The navies use autonomous underwater vehicles and sea gliders for detecting enemy submarines, mines, intelligence surveillance and reconnaissance (ISR), area monitoring and combat purposes; therefore, they are outfitted with sensors and weapons and designated as unmanned underwater sensor and weapon carriers (UUSWCs) in this article.
| Product | Make | Weight (kg) |
| Remus 100 | Hydroid LLC | 37 |
| Gavia | Hafmynd ehf | >44> |
| SUBROV (Sea Owl ROV) | Saab Underwater Systems | 100 |
| Remus 600 | Hydroid LLC | 240 |
| Bluefin | Bluefin Robotics Corporation | 330 |
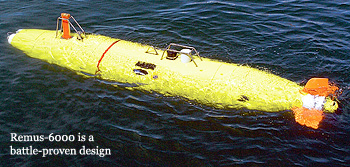
| Remus 6000 | Hydroid LLC | 862 |
| Hugin 1000 | Kongsberg Maritime AS | 650 |
| Hugin 3000 | Kongsberg Maritime AS | 1400 |
| Talisman | BAE Systems | 1800 |
The US Navy’s vision for UUSWCs combat deployment has been articulated, based upon three tenets: first, sea strike, which is a broad concept for projecting precise and persistent offensive power from the sea, second, sea shield, which is the concept focused on the protection of national interests by sea-based defence resources and third, sea basing, which endeavours to support versatile and flexible power projection, enabling forces up to the size of a Marine Expeditionary Brigade to move to objectives deep inland. The US Navy plans to deploy the UUSWCs for the following purposes:
- Special purpose ISR, harbour ISR, tactical ISR, persistent ISR, clandestine reconnaissance, OP-AREA reconnaissance, Inspect/ID.
- Very shallow water mine countermeasures (MCM)/shallow water MCM (coastal/riverine), MCM neutraliser, explosive ordnance disposal (EOD).
- Submarine decoy, anti-submarine warfare (ASW).
- Payload delivery (mine warfare, antisubmarine warfare (ASW), special operations, EOD, time critical strikes).
- Network attack, information operations and electronic warfare.
- Expendable communication network navigation node (CN3), mobile CN3.
- Port defence.
- Oceanography.
Sensors Onboard UUSWCs: These are currently carrying five types of sensors namely; acoustic, magnetic, electromagnetic, optical, and conductivity, temperature, and depth (CTD) sensors.
Active sonars are used to map out their environments and detect objects of interest. Passive sonars are used primarily for ASW missions. Multi-beam obstacle-avoidance sonars use advanced signal processing techniques to obtain maximum information for obstacle avoidance. Beam forming in passive sonars and synthetic aperture technology in active sonars are current trends. Magnetic compasses, magnetometers, nontraditional trackers, video cameras, nonimaging sensors and CTD sensors are the most common sensors in use.
Levels of Autonomy: Six levels of vehicle autonomy have been defined by the Office of Naval Research (ONR), USA, in order of decreasing autonomy, namely, fully autonomous, mixed initiative, human supervised, human delegated, human assisted and human operated.
Factors that Impact Induction of UUSWCs in the Navy
While there are definite advantages of using unmanned systems in combat, there are some factors which will be deciding the eventual induction and integration of unmanned systems in the Navy.
Space: Navies are always constrained for space on-board ships and submarines and UUSWCs would require a demarcated launch, recovery, stowage and maintenance area for them as well as associated logistics. Under this head, it would be wise to include the UUSWC operators and maintenance personal and their on-board logistic requirements and UUSWC operation rooms. Serious and specific studies would have to be done prior to the induction as this would eventually lead to changes in design of ships and submarines.
Weight and Endurance: These are related issues, the larger the UUSWC, the greater the endurance and larger the payload. Thus navies would have to decide on the endurance required and the payload suitable for the role for which UUSWC would be utilised. The UUSWCs choice would also depend upon the conditions at sea under which it has to operate, which would again have an impact on ruggedisation, weight, endurance and cost.
Currently, these vehicles are broadly available in three categories, namely:
Very Small: They have limited endurance (a few hours), limited sensor abilities, must get close to target for performing the assigned mission. However, they are relatively inexpensive, hand-portable, difficult to detect and could be expendable. One of the battle-proven designs is the REMUS UUV.
Medium: This category has weights from upwards of 100 kg to a few tonnes. However, compared to manned vehicles for carrying out the same tasks, these vehicles weigh much less and can do the assigned tasks with great efficacy. Medium-sized UUSWCs role as a communication node has emerged as a predominant mission due to complexities of communication with UUVs. Currently, UUSWCs launched from submarine tubes for mine-hunting, is an example of such vehicles.
Large Vehicles: These are vehicles which weigh a couple of tonnes or more and carry powerful sensors and/or weapon payloads and can operate over long periods. They can operate under hostile environment for long durations, unsuitable for manned vehicles. Liberdade class flying wing underwater glider for tracking submarines for days together is an example of such systems.
Hundreds of different UUVs have been designed over the past 50 or so years, but only a few companies sell vehicles in any significant numbers. There are around 10 companies that sell UUVs on the international market, including Kongsberg Maritime, Hydroid (now owned by Kongsberg), Bluefin Robotics, Teledyne Gavia (previously known as Hafmynd), and International Submarine Engineering (ISE) Ltd.
The vehicles range in size from manportable lightweight UUVs to large diameter vehicles of over 10 metres length. Large vehicles have advantages in terms of endurance and sensor payload capacity; smaller vehicles benefit significantly from lower logistics (for example: support vessel footprint; launch and recovery systems). Most UUVs follow the traditional torpedo shape as this is seen as the best compromise between size, usable volume, hydrodynamic efficiency and ease of handling. There are some vehicles that make use of a modular design, enabling components to be changed easily by the operators.
The market is effectively split into three areas: scientific (including universities and research agencies), commercial offshore (oil and gas, etc) and military application (mine countermeasures, battlespace preparation). The majority of these roles utilise a similar design and operate in a cruise (torpedotype) mode. They collect data while following a preplanned route at speeds between one and four knots. Commercially available UUVs include various designs such as the small REMUS 100 AUV produced commercially by Hydroid, Inc.; the larger HUGIN 1000 and 3000 AUVs developed by Kongsberg Maritime and Norwegian Defence Research Establishment; the Bluefin Robotics 12- and 21-inch diameter (300 and 530 mm) vehicles and the Explorer by International Submarine Engineering Ltd.
The market is evolving and designs are now following commercial requirements rather than being purely developmental. Upcoming designs include hover-capable UUVs for inspection and light-intervention (primarily for the offshore energy applications), and hybrid AUV/ROV designs that switch between roles as part of their mission profile (see table for some of the popular unmanned underwater vehicles).
SP's Naval Forces - CURRENT ISSUE
