

INDIAN ARMED FORCES CHIEFS ON
OUR RELENTLESS AND FOCUSED PUBLISHING EFFORTS

SP Guide Publications puts forth a well compiled articulation of issues, pursuits and accomplishments of the Indian Army, over the years

I am confident that SP Guide Publications would continue to inform, inspire and influence.

My compliments to SP Guide Publications for informative and credible reportage on contemporary aerospace issues over the past six decades.
Unmanned
Autonomous Undersea Vehicles Surfacing
UUVs have undergone over three decades of development and experimentation effort spearheaded by the US Navy. Rapid induction of UUVs in large numbers is likely to revolutionise naval operations itself.
“It’s [NSCT-1 UUV Platoon] done a wonderful job for us over there in the Umm Qasr vicinity and we are looking forward to the end of the conflict to be able to tell the full story of the first operational deployment of UUVs.”
— Rear Admiral Paul Ryan, CMWC, Inside the Navy, March 31, 2003
Unmann ed und ersea vehi - cles (UUV) were used during Operation Iraqi Freedom for minehunting by the Naval Special Clearance Team (NSCT) One. The UUVs carried out operations in the port of Umm Qsar. Additional UUV operations were done up river at Karbala and Az Zubayr, Iraq. NSCT One initially checked the bottom for mines then the divers carried out searches of the quay wall and the surrounding areas to locate mined zones. The use of UUVs in operation Iraqi Freedom also proved its utility in hostile war like conditions and in generating valuable oceanographic and environmental data for military as well as commercial use.
The term unmanned undersea vehicles encompass the remotely operated vehicle (ROV), the Paravane, the seaglider, the autonomous undersea vehicle (AUV) and various hybrids. AUVs are free-swimming autonomous underwater vehicles characterised by modularity, reliability and possibility for custom design.
AUV Subsystems
A perspective into components of an AUV would bring out the technological complexities involved in the design and competence required for its manufacture. An AUV consists of subsystems like pressure and hydrodynamic hull, ballast system, masts, power and energy system, propulsion system, obstacle-avoidance system, manoeuvring system, communications system, sensors, navigation system, host interfaces and combat payload.
Pressure and Hydrodynamic Hull: UUV structure makes the vehicles rigid and provides strong points for control surfaces, thrusters, batteries and other UUV components while permitting internal components to be accessed. Pressure hull enables UUV to withstand sea pressure as it descends into the ocean. The pressure to which an UUV is subjected increases linearly with depth. At 6,000 m, the sea pressure is about 4.4 tonnes per square inch (psi), whereas at 300 m sea pressure, it is about 441 psi. For relatively shallow operation, therefore, the hulls of AUVs can be fabricated from lighter materials such as aluminium.
Hydrodynamic hull design reduces drag as UUV moves through the ocean. Minimising drag to maximise speed and endurance is one of the design objectives along with controlling flow over the UUV body for efficient propulsion. Stability and manoeuvrability at low speeds are difficult. Sensor operation stabilisation at higher speeds is problematic. Stability in AUV design scores over speed and endurance.
Ballast System: Neutral or near-neutral buoyancy in submerged UAV is achieved through ballasting. Lead or foam fixed buoyancy systems are used which can be adjusted depending upon the changes in role/payload of the AUV. Variable ballast system is used for diving or surfacing the AUV and drop ballast system is used for surfacing the AUV in case of an emergency.
Power and Energy System: The power requirements of an AUV until recently were being met with by the use of silver zinc batteries. However, due to their higher costs and limited shelf and cycle lives, they are being replaced with lithium ion or lithium polymer batteries. Solar powered AUVs, which surface during the day for recharging, have also been developed. Bus system is used for uniform power distribution.
Propulsion System: Brushless DC motors with propellers are favoured for AUVs of the torpedo type since they are better than the motors with brushes in factors of reliability, efficiency and power density.
Obstacle-Avoidance System: Obstacle avoidance is carried out by use of single or multiple acoustic beam systems to detect and avoid obstacles. Avoidance manoeuvres are pre-programmed in the AUV. However, these need much more fine-tuning as they continue to be an area of concern.
Manoeuvring System: Control surfaces, vectored propulsors or thrusters are generally used for AUV manoeuvres. For hovering, lateral or vertical movement multi thrusters are utilised.
Communications System: Communication is essential for an AUV when submerged or surfaced. Acoustic systems are usually used underwater. Emergency beacons and locating mechanisms in emergency or on completion of mission are also built in an AUV.
Masts: This is a complicated design feature as it impacts the launch and recovery of an AUV. The masts are used for mounting sensors, communication and navigation antennas.
Sensors: Sensors can be put into following groups: conductivity, temperature, and depth (CTD) sensors, acoustic sensors; electromagnetic sensors; magnetic sensors; optical sensors; and chemical, biological, radiological, nuclear and explosives (CBNRE) sensors.
Navigation: GPS can only be used by AUVs when they are near the surface. For underwater navigation they use inertial navigation system (INS) and doppler velocity log navigation systems. Gyroscopes for orientation, accelerometers for velocity changes and propeller turn rates for speed measurements form the main components of the INS. Doppler shift provided by the down-track and cross-track sonar returns give accurate speed and course.
Host Interface: Host interfaces form one of the most important aspects of AUV design. These include both the software and the hardware interfaces with which the AUV communicates with its controlling vessel. Launch and recovery, signal, control and power are some of the interfaces required.
Combat Payload: This may include specially designed torpedoes, missiles or mines.
AUVs in the US Navy
The UUV programme was launched in the US Navy with the aim of shaping, controlling and enhancing intelligence about the undersea battlespace. The nuclear attack submarines (SSNs) were to be aided by UUVs in gaining access to denied areas (for e.g. mined, shallow littorals, obstacle infested, etc) through the use of UUV sensors and weapons which would surreptitiously gather information and clear hindrances. The UUVs were to enhance the SSN missions of undersea environmental sensing and mapping, mine warfare and intelligence, surveillance and reconnaissance (ISR). UUVs were perceived to play a significant role in maintaining undersea dominance of the US submarines.
Mine warfare support was the initial requirement to provide SSNs with UUVs. The near-term mine reconnaissance system (NMRS) with the submarines includes two UUVs linked to the submarine by fibreoptic cable, and is deployed through the submarine’s torpedo tubes. It provides a preliminary, limited mine-detection and classification capability. The long-term mine reconnaissance system (LMRS), launched from the submarine’s torpedo tubes, is an AUV that uses acoustic and radio-frequency links rather than a fibreoptic link. SSN’s minehunting capabilities were expected to be greatly enhanced by the LMRS. The LMRS is a complex AUV that operates secretly from a nuclear submarine and utilises submarine’s torpedo tubes for launch and recovery. The LMRS is a self-propelled 21-inch diameter AUV AN/BLQ-11 fitted with search and classification sonars for locating mine-like objects as much as 200 km ahead of the submarine. LMRS has both forward-looking sonar and side-scan synthetic aperture sonar. It has been developed by Boeing Defense Space & Security and has successfully proved on USS Scranton (SSN-756).
The Navy’s 21-inch mission reconfigurable unmanned undersea vehicle system (MRUUVS), which is launched and recovered from submarine torpedo tubes, is being developed to independently gather required information. Each MRUUVS includes a vehicle, equipment for mine countermeasures, combat and control interfaces and ISR. The littoral precision undersea mapping array (LPUMA) was developed as a part of this project for identification and avoidance of obstacles. Mine identification capability was demonstrated in an improved model of LPUMA which was deployed on a 21-inch vehicle.
Other programmes worth mentioning are remote environmental measuring units (Remus) which is a small AUV that can be launched by hand from a boat/shore to survey a desired underwater area; battlespace preparation autonomous underwater vehicle (BPAUV) which is a much bigger AUV and used for a much larger area; the littoral battlespace sensing–unmanned undersea vehicle programme (LBS-UUV) which provides a low-observable, continuous capability to enable predictions in case of performance of optical weapon and sensors by typifying properties of the ocean that have influence on the propagation of light and sound. Under this project, electrically-powered AUVs (LBS-AUV) and buoyancy-driven undersea gliders (LBS-G) would be developed. These would enable planning and execution of anti-mine, antisubmarine and expeditionary warfare. They will also enable intelligence preparation of the environment (IPOE). LBS-AUV has reached full-rate production stage in June 2012, two engineering design models have been delivered to the Naval Oceanographic office and by financial year 2017, a total of eight vehicles will be delivered. It has been developed by Teledyne and Hydroid.
Two major programmes in developmental stage as articulated by the US Navy are the large-displacement UUV (LDUUV) which will provide long endurance, persistent, multimission unmanned undersea vehicle capability for the Navy and will contribute to the joint air-sea battle across all phases of operations. LDUUV initial operational capability is expected in financial year 2021; the persistent littoral undersea surveillance (PLUS) system is a cluster of networked AUVs and gliders providing an effective, persistent, adaptive and passive acoustic undersea surveillance capability. PLUS monitors shallow-water environment from fixed positions on the ocean floor, or moves through the water to scan large areas for extended periods of time.
Some leading companies in the field of AUV manufacture are:
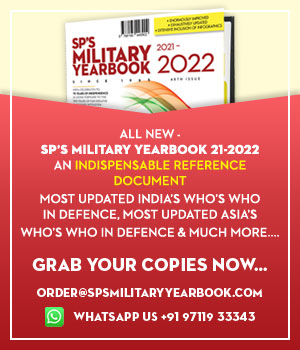
Bluefin Robotics: In 1997, Bluefin was founded by a core group of engineers from the MIT AUV Laboratory. Now it is a wholly-owned subsidiary of the Battelle Memorial Institute. It develops, builds, operates AUVs and related technologies for defence, commercial and scientific use. Bluefin has designed over 50 different configurations of modular, free-flooded AUV platforms and over 70 different sensors. Bluefin provides full AUV life-cycle support encompassing research and development, technology integration, manufacturing, platform training and operations support. Its products include Bluefin-9, Bluefin-12S, Bluefin-21, Spray Glider, etc. The Bluefin-9 is a lightweight, two-man portable AUV with a mission turnaround time of less than 15 minutes. Equipped with a side scan sonar and camera, the Bluefin-9 provides the performance of much larger AUVs in a convenient and rapidly deployable package. The Bluefin-21 is a highly modular AUV able to carry multiple sensors and payloads at once. It claims a high energy capacity that enables extended operations even at the greatest depths. The Bluefin-21 has huge capability but is also flexible enough to operate from various ships of opportunity worldwide. The Bluefin Spray Glider is a deep-diving, buoyancy-driven AUV. The Spray Glider collects water column data profiles using a pumped conductivity-temperature-depth sensor and other instruments. Deployments of up to six months can be achieved with a single set of batteries.
Kongsberg Maritime: They design and manufacture the Hugin, Remus and Seaglider product lines of commercial offthe-shelf AUVs. These AUVs have different capabilities and different applications and roles. Its Hugin AUVs are being used commercially and in the Navy. Hugin has been operated in various parts of the world including tropical waters and the Arctic. Kongsberg Maritime’s Remus vehicles are used in a wide number of applications in navies, hydrography and marine research. It has delivered over 200 Remus vehicles. The MK 18 Mod 2 Kingfish UUV is based on the Remus 600 and has increased area coverage rate, increased endurance and serves as a platform for advanced sensors. The Kingfish small synthetic aperture sonar module configuration provides wider swath, higher resolution imagery and buried target detection. It has been deployed by the US Navy in the fifth fleet area of responsibility in June 2013.
Its Seaglider has changed the way oceanographic data is collected. Seaglider’s extreme long endurance allows collection of data at a fraction of the cost of traditional methods. Naval planners, researchers and commercial enterprises are using these vehicles in a wide variety of applications.
Trends
UUVs have undergone over three decades of development and experimentation effort spearheaded by the US Navy, rapid induction in large numbers is likely to revolutionise naval operations itself. What they would provide in near future is:
- Increased intelligence and onboard decision-making by use of different unmanned vehicle types like AUVs, ROVs, Gliders, etc.
- Much more effective mine countermeasures and rapid environmental assessment by use of synthetic aperture sonar.
- Induction of propulsion technology from gliders into AUVs to extend the range considerably.
- Increased connectivity, efficient recharging and reliable docking.
- The birth of a new class of smarter weapons for use from AUVs.
SP's Naval Forces - CURRENT ISSUE
