


The insightful articles, inspiring narrations and analytical perspectives presented by the Editorial Team, establish an alluring connect with the reader. My compliments and best wishes to SP Guide Publications.

"Over the past 60 years, the growth of SP Guide Publications has mirrored the rising stature of Indian Navy. Its well-researched and informative magazines on Defence and Aerospace sector have served to shape an educated opinion of our military personnel, policy makers and the public alike. I wish SP's Publication team continued success, fair winds and following seas in all future endeavour!"

Since, its inception in 1964, SP Guide Publications has consistently demonstrated commitment to high-quality journalism in the aerospace and defence sectors, earning a well-deserved reputation as Asia's largest media house in this domain. I wish SP Guide Publications continued success in its pursuit of excellence.
Marketing Feature
Submarine rescue systems emerged nearly simultaneously with undersea fleet and have been progressing with the fleet, while gaining tragic experience of submarine averages and accidents.
The principal “wet” way to rescue men from a sunken submarine comes to just getting out and free ascending; invention of SCUBA multiplied submariners’ chance to stay alive. However, its primary drawbacks are unavoidable contact between man and hostile water environment and decompression requirements; this directed the engineering efforts toward development of a “dry” rescue system that could be external with respect to submarine.
In the early twentieth century, displacement of most submarines was within 500-600 tons and navigation was limited by the coastal areas. Therefore, accidents took place mainly in shallow waters. Under these circumstances, the simplest way to rescue submariners was to recover the suffered submarine together with her crew using a dedicated rescue (salvage) vessel. This idea was implemented first in Germany in 1907. The Russian Navy obtained such a vessel, Volkhov catamaran, in 1915.
As submarines matured, their displacement grew and navigation areas expanded; this required new approaches to salvage injured submarines. In the 1930s, there appeared a new rescue bell (McCann’s rescue chamber); its capabilities were demonstrated in 1933 when 33 men of U.S. submarine Squalus sunken at the depth of 80 m were rescued. Thereafter, submarine rescue vessels that were, in fact, ocean-going tugboats, were equipped with rescue bells.
In the USSR in the 1950s, there was successively designed a series of rescue bells SK-57, SK-59, SK-527 and SK-64 rated up to 500 m deep.
Autonomous rescue vehicles were the next step. The world’s first rescue vehicle (named UPS that in Russian stands for “steerable underwater vehicle”) rated to 200 m was designed in the USSR. The retrofitted type 666 submarine with UPS on board sailed first in 1961. As long ago as the next year, for the first time in the world, in the USSR a man was transferred dry from one submarine to another.
Based on the first underwater rescue equipment operation experience, a proper underwater rescue vehicle of type 1837 was designed.
Then in 1963 the U.S. Thrasher submarine was lost, Lockheed Corporation designed and constructed very expensive deep submergence rescue vehicles (Avalon and Mystic DSRVs, 1971-1972), whose capabilities remained unrivaled for long. Similar vehicles were constructed in the UK, Germany, Sweden, Italy and China; the Soviet Union constructed most of them (14 units).
Almaz Central Marine Design Bureau is a Russian monopolist in designing special warships and vessels including naval rescue and salvage vessels. Type 527/527M universal rescue vessels were designed by Almaz and constructed in the 1960s; in terms of capabilities they faced no competitors either in the Soviet or any other navy over two next decades. The unique Karpaty type 530 salvage vessel constructed in 1967 is still in service in the Russian Navy.
In the mid 1960s, the navy prepared a task specification for an ocean-going rescue vessel that could carry several different underwater vehicles. The Elbrus type 537 lead ship constructed in 1980 could support diving operations up to 200 m deep, her rescue vehicles were rated to 500 m, and Poisk-2 search and exploring vehicle was rated to 2 000 m. The MTK-200 television system was provided for inspection of underwater objects. Heavy-duty dewatering pumps (rated to 4 000 m3/h) and a towing winch (rated to 60/30 t), as well as firefighting means were provided for salvage of surfaced submarines and surface ships. The ship could permanently carry the Ka-27PS helicopter.
Elbrus had the most powerful electric propulsion system (4 gensets 5 000 kW each supplying two propulsion motors 10 000 kW each) to move the ship at 1...18 knots and to provide power to all the loads for dynamic positioning and launching/recovery of underwater vehicles; a number of tunnel thrusters (4?500 kW) along with automatics and navigation aids provided dynamic anchorless positioning up to 2 000 m deep; an anchor arrangement was suitable for anchoring up to 500 m deep with four anchors and up to 2 000 m deep with one anchor.
In the mid 1980s Almaz designed type 05430 vessel. Upon this design in 1988 construction of Gindukush rescue vessel commenced. This vessel could carry an autonomous underwater vehicle and a newgeneration DP system.
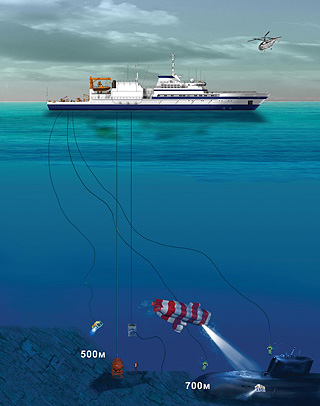
The Russian Bester third-generation autonomous rescue vehicle (type 18270) transferred from the navy in 1994 features titanium pressure hull. Thanks to that the vehicle can operate at a depth of up to 720 m and take 16-18 “dry” men on board from an injured submarine. Displacement of the vehicle is 39 m3. It can be transported by trucks or by air.
This vehicle will be upgraded: it will receive new sonars (frequencies for underwater sound communication and emergency signal direction finding were accorded to NATO standards), navigation aids, automatic system for seating onto an injured submarine’s coaming flange, some improvements for seating onto a greatly sloped coaming flange, and a new survivor life-support system. The vehicle is going to be installed on board type 21300 rescue vessel designed by Almaz and being constructed for the Russian Navy.
As the Indian navy receives up-to-date conventional submarines (including the Russian ones), it seems to be quite topical to improve their search-and-rescue support. Operation in the deep seas makes it of primary importance to provide searchand-rescue support for surfaced injured submarines.
Upon examination of rescue operations, we can see that it was the search and rescue support that ensured success in rescue operations. Thus, more than 70 per cent successful rescues fall to rescue of submariners who managed to leave injured bottomed submarine by themselves in individual rescue suits, 20 per cent to salvage of submarines themselves, and 10 per cent to other rescue operations.
Wreckage of the Kursk nuclear submarine in 2000 highlighted a problem of interaction between various navies for search and rescue of injured submarine crews. One of possible ways to improve effectiveness of the Indian Navy’s S&R support system is to integrate it into the international injured submarine crew rescue system. Possible cooperation in this area may mainly result in preparation of an agreement on the rescue of injured submarine crews between India and the Russian Federation, as well as other countries. Now, contacts between India and other interested states are being developed; bilateral and multinational exercises, cooperation and sharing experience are being conducted.
