
INDIAN ARMED FORCES CHIEFS ON OUR RELENTLESS AND FOCUSED PUBLISHING EFFORTS

The insightful articles, inspiring narrations and analytical perspectives presented by the Editorial Team, establish an alluring connect with the reader. My compliments and best wishes to SP Guide Publications.

"Over the past 60 years, the growth of SP Guide Publications has mirrored the rising stature of Indian Navy. Its well-researched and informative magazines on Defence and Aerospace sector have served to shape an educated opinion of our military personnel, policy makers and the public alike. I wish SP's Publication team continued success, fair winds and following seas in all future endeavour!"

Since, its inception in 1964, SP Guide Publications has consistently demonstrated commitment to high-quality journalism in the aerospace and defence sectors, earning a well-deserved reputation as Asia's largest media house in this domain. I wish SP Guide Publications continued success in its pursuit of excellence.

- MoD initiates comprehensive review of Defence Acquisition Procedure 2020, pushes for defence reforms
- G7: The Swansong
- Kalinga Connect: South Asia to Polynesia
- Advanced MRSAM for India for a greater firepower
- Must Credit DRDO for Operation Sindoor, now what is next for defence R&D?
- Operation Sindoor | Day 2 DGMOs Briefing
- Operation Sindoor: Resolute yet Restrained
Technology
Unmanned/Autonomous Underwater Vehicles
The interest in UUVs/autonomous underwater vehicles (AUVs) has been further rejuvenated when the search and rescue team for flight MH370 decided to send AUV Bluefin-21
where to buy low dose naltrexone
buy generic naltrexone online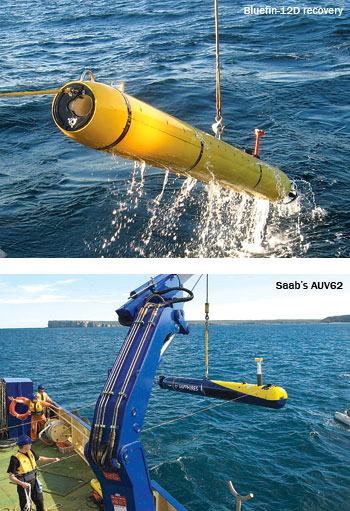
Requirement of Underwater Unmanned vehicles (UUVs)/autonomous underwater vehicles (AUV) unmanned platforms operating from land, sea and air have acquired great importance in the current warfare scenario as it removes the crew from danger and allows them to access dangerous, difficult and inaccessible situations. The US’ Drone war has caused about 2,500 casualties in the recent times in countries like Pakistan, Somalia, etc without declaring war on them. Majority of the navies have to operate in the littorals which are shallow and restricted in space and thus constrain manoeuvre thereby placing the naval platforms in harm’s way. This is of special concern to the submarines when they are deployed in the littorals to carry out intelligence, surveillance and reconnaissance missions or carry out covert operations. The US Navy is seized with this problem and for the last few decades has been investing in the development of UUVs as they are the ideal platform for mine detection thus they have been included in the long-term mine reconnaissance system (LMRS) and its successor, the mission reconfigurable UUV (MRUUV). The development in the last few decades particularly in the field of propulsion, control systems, hydrodynamics and sensor technology have boosted the developing in UUVs/AUVs. The inherent characteristic of subsurface stealth and no risk to the crew, adds to the employment of UUVs/AUVs. The Defense Advanced Research Projects Agency of US has been examining the feasibility of very long-endurance AUVs so that they can replace manned systems for this role. The interest in UUVs/AUVs has been further rejuvenated when the search and rescue team for flight MH370 decided to send AUV Bluefin-21, four km underwater, to look for the wreckage of flight MH370. Some of the roles could be:
Port and Harbour Security. UUVs/AUVs are ideally employed for port and harbour security to prevent smuggling and terrorism as they have the ability to provide hull, pier and harbour bottom inspection and to operate in confined areas.
Ship Hull and Infrastructure Inspection. Normally the Inspection of ship hulls and other infrastructure for maintenance and sabotage is done by divers which is a manpower intensive and time consuming activity and also prone to personnel risk. Hull inspection is considered “dull, dirty and dangerous” job in the navy as the diver has to physically touch the hull due to limited visibility however a hovering AUV (HUAV) is capable of this task even in turbulence conditions. UUVs/AUVs are thus ideal for these tasks.
Mine Countermeasures (MCM). MCM include the detection, classification, identification, location, clearance and protection against mines. Traditionally MCM is done by ships which is prone to grave risk but with the advancements in UUVs/AUVs/HUAVs technology, they are being designed and deployed for MCM role.
Unexploded Ordnance (UXO). Presence of UXO is commonplace in areas of maritime conflict or areas in proximity. The technologies applicable for MCM can easily be extended to detect, classify and neutralize the UXO.
Rapid Environmental Assessment (REA). REA information like bottom type and composition, bathymetric data, oceanographic data, current and tidal information, etc. is a must for decision making which is done by ship-based sensors but UUVs/AUVs can do this task faster and covertly.
Anti-submarine Warfare. Submarines have a key role to play in maritime operations but are high cost assets thus the UUVs/AUVs can operate as off board sensors and extend the range of detection without increasing the risk with less cost.
Intelligence, surveillance and reconnaissance (ISR). ISR mission are an essential part of operation planning be it be MCM or ASW. UUVs/AUVs are the most suitable for this role as they carry a wide-range of sensors, can provide covert persistent surveillance, operate at long stand-off distances, operate in shallow water areas, reach difficult and normally inaccessible areas and can be launched from surface, air and subsurface platforms.
Examples
Bluefin-21(Bluefin Robotics) is a highly versatile search/survey vehicle equipped with modern sensor payload suite
General Dynamics’ Knifefish
General Dynamics Advanced Information Systems has designed and build Knifefish, the Surface MCM UUV system, on a contract from US Navy’s Naval Sea Systems Command. Knifefish is being developed as a part of the Littoral Combat Ship Mine Warfare mission package. Knifefish is the first heavyweight class mainstream MCM UUV which will act as an off-board sensor while the host ship stays outside the minefield boundaries. This will reduce the risk to navy personnel while providing enhanced mine-hunting capability. Knifefish can detect, classify and identify buried mines and mines in high clutter environments.
Remote Environmental Monitoring Unit System (REMUS). REMUS AUV was first developed in the late 1990s for the Woods Hole Oceanographic Institute by Hydroid, a subsidiary of Kongsberg Maritime. The man-portable class 36 kg REMUS 100 AUV is used by the US Navy for shallow water MCM and hydrographic reconnaissance. Japan operates four of the REMUS 600-metre variants and one REMUS 100 for seafloor mapping and MCM. Three variants of the REMUS are in service in the US Navy as follows:
- MK 18 Mod 1 Swordfish. Based on the REMUS 100 (Kongsberg Maritime), the Swordfish is designed to Search, Classify, and Map (SCM) the Very Shallow Water (VSW) Region (10-40 ft).
- Kongsberg Maritime’s REMUS 600. The REMUS 6000 has been designed to enable operations from a water depth of 6,000 metres to long mission durations in shallow littoral areas. It can carry out deep ocean search and survey, deep ocean acoustic and optical surveys and debris field mapping.
- MK 18 Mod 2 Kingfish. The Kingfish is based on the REMUS 600 and has increased area coverage rate, increased endurance, and will serve as a platform for advanced sensors. The Kingfish Small Synthetic Aperture Sonar Module configuration provides wider swath, higher resolution imagery, and buried target detection.
Littoral Battlespace Sensing (LBS UUV). This is also based on REMUS 600 and used for environmental surveys of ocean, coastal, and inshore waters.
SEAGLIDER™. Also of Kongsberg Maritime, Seaglider™ is an AUV or underwater glider developed for continuous, long-term measurement of oceanographic parameters. Rather than an electrically driven propeller, the vehicle uses small changes in buoyancy and wings to achieve forward motion. It has revolutionised the way that oceanographic data is collected. Its novel method of propulsion uses very little energy, provides extremely long endurance allows collection of data at a fraction of the cost of traditional methods.
Bluefin-21 AUV. Bluefin-21 (Bluefin Robotics) is a highly versatile search/survey vehicle equipped with modern sensor payload suite that includes side scan sonar, sub-bottom profiler, multi-beam echo- sounder and digital camera. An onboard inertial navigation system and an ultra-short baseline system capability provides for accurate navigation and poseitioning of the vehicle. It can operate at a depth of 1500 metres, Air Weight is approximately 800 kg, speed of 2 to 4.5 knots (about 4 to nine kmph) and estimated endurance is about 20 hours at 3 knots. Standard payload consists of EdgeTech 2200-M 120/410 kHz side scan sonar (option: EdgeTech 230/850 kHz dynamically focused), EdgeTech DW-216 sub-bottom profiler, and Reson 7125 (400 kHz) multi-beam echo-sounder. It also includes a camera as optical payload. The side-scan sonar transmits a pulse which produces a high-resolution 3D map of the sea floor. Bluefin-21 is in the news as it is being employed to search for the wreckage of Flight MH370. Apart from search it can be used effectively for MCM and UXO operations.
Hovering AUV (HAUV). HUAV is a two-man-portable hovering AUV designed for ship hull inspection. Equipped with a high-resolution imaging sonar, it surveys ship hulls and other structures with minimal prior knowledge. While surveys are executed autonomously, the operator can manually control the vehicle to further on areas of interest. It can autonomously locate and relocate contacts on a ship’s hull with a precision of better than two metres CEP 50. Its integrated DIDSON™ sonar provides high-resolution sonar images that can be viewed in real time over the vehicle’s fibre optic tether. It has the ability for precise manoeuvrability. It has endurance up to 3.5 hours with standard payload in still conditions. It can operate at depths of 30 metres or 60 metres. HAUV can also be used for Port and Harbor Security, MCM and UXO search.
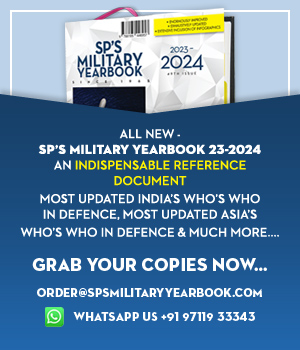
Bluefin-12 DAUV. Bluefin-12D is modular in construction to allow tailor made payloads to suit multiple roles. Apart from typical commercial uses it can be effectively employed for MCM and UXO detection and destruction role. It can dive up to 1,500 metres, has an endurance of 30 hours at 3 knots with standard payload, speed up to 5 knots and, standard payload of EdgeTech 2200-MP 120/410 kHz side scan sonar and Digital camera, LED-based strobe. These payloads can be interchanged with other sensors depending upon the role.
Saab’s AUV62 “Sapphires”. Sapphire is a modular AUV which can perform a variety of missions. The AUV62-MR (Mine Reconnaissance) version includes a dual flank-array sonar and high-resolution gap-filler sonar for long endurance mine hunting. The Synthetic Aperture Sonar can be effectively used mine search, reconnaissance and seabed mapping. It also has an anti-submarine target variant in which an omni directional hydrophone replaces the forward-looking sonar in the base module with a transducer section and a towed transducer tail to generate realistic submarine noise and sonar echoes. The Swedish Navy employs it in MCM and rapid environmental assessment role. Swedish Navy has also recently signed a contract with Saab for $22.5 million to acquire the training variant of Sapphire AUV.
Indian Perspective
With India’s large coastline, maritime trade interests in the Indian Ocean and real threats of smuggling and terrorism, UUVs/AUVs make an attractive tool in the hands of the Navy and the Indian Coast Guard to counter them. It is understood that DRDO (Naval Science and Technological Laboratory) is making an endeavour to develop UUVs/AUVs but details are not known. India has so far not developed a torpedo or submarine launched ballistic missile although efforts are on but these are very complex technologies and India has quite a distance to cover. Meanwhile it would be prudent to acquire these technologies from US/Europe as it plays a major role in making systems safe and efficient.
SP's Naval Forces - CURRENT ISSUE
